 进程间的通信方式
进程间的通信方式
# 进程间的通信方式
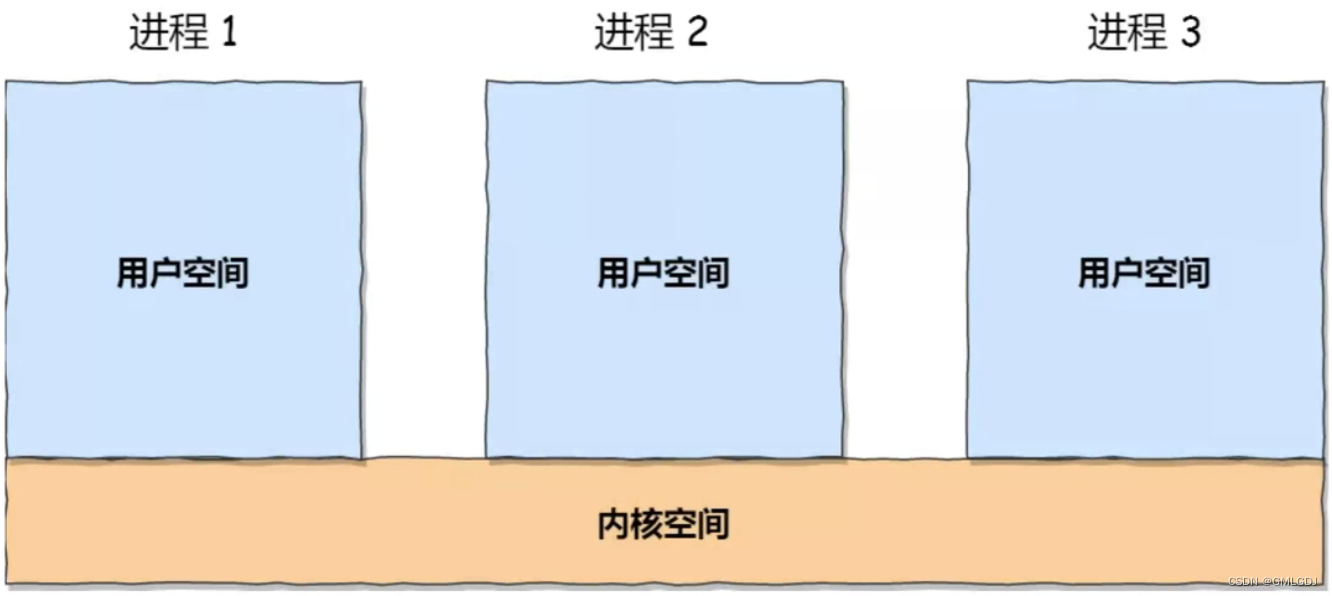
每个进程的用户地址空间都是独立的,一般而言是不能互相访问的,但内核空间是每个进程都共享的, 所以进程之间要通信必须通过内核。
进程间通信目的一般有共享数据,数据传输,消息通知,进程控制等。以 Unix/Linux为例,介绍几种重要的进程间通信方式:管道、消息队列、共享内存、信号量、信号、Socket。
# 管道
⭐ 匿名管道(Pipes):用于具有亲缘关系的父子进程间或者兄弟进程之间的通信。只存在于内存中。
Linux命令中的竖线
|就是一个管道,它的功能是将前一个命令的输出,作为后一个命令的输入。
ps -ef | grep nginx:ps -ef的输出作为grep nginx的输入。
从该功能描述可以看出管道传输数据是单向的,如果想要互相通信,需要创建两个管道才行。该管道没有名字,所以 | 表示的管道为匿名管道,用完就销毁。
⭐ 命名管道(Names Pipes,FIFO):有名管道严格遵循先进先出(FIFO)。有名管道以磁盘文件的方式存在,可以实现本机任意两个进程通信。
使用管道前,需要通过 mkfifo 命令来创建,并指定管道名字:mkfifo myPipe,基于Linux一切皆文件的理念,所以管道也是以文件的方式存在,我们可以用 Is 查看 rm 删除。
$ echo "hello" > myPipe // 将数据写进管道
// 停住了,这是因为管道里的内容没有被读取,只有当管道里的数据被读完后,命令才可以正常退出。
$ cat < myPipe // 读取管道里的数据
hello
2
3
4
5
管道的优缺点:
- 管道这种通信方式效率低, 不适合进程间频繁地交换数据。当然,它的好处,自然就是简单,同时也我们很容易得知管道里的数据已经被另一个进程读取了。
- 对于匿名管道,它的通信范围是存在父子关系的进程。因为管道没有实体,也就是没有管道文件,只能通过 fork来复制父进程fd文件描述符,来达到通信的目的。
- 对于命名管道, 它可以在不相关的进程间也能相互通信,用制了一个类型为管道的设备文件, 在进程里只要使用这个设备文件,就可以相互通信。
# 消息队列
前面说到管道的通信方式是效率低的,因此管道不适合进程间频繁地交换数据。
比如,A进程要给B进程发送消息,A进程把数据放在对应的消息队列后就可以正常返回了,B进程需要的时候再去读取数 据就可以了。同理,B进程要给A进程发送消息也是如此。
消息队列是保存在内核中的消息链表,在发送数据时,会分成一个一个独立的数据单元,也就是消息体 (数据块),消息体是用户自定义的数据类型,消息的发送方和接收方要约定好消息体的数据类型,所以每个消息体都是固定大小的存储块,不像管道是无格式的字节流数据。如果进程从消息队列中读取了消息体,内核就会把这个消息体删除。
消息队列可以实现消息的随机查询,消息不一定要以先进先出的次序读取,也可以按消息的类型读取,比命名管道更有优势。
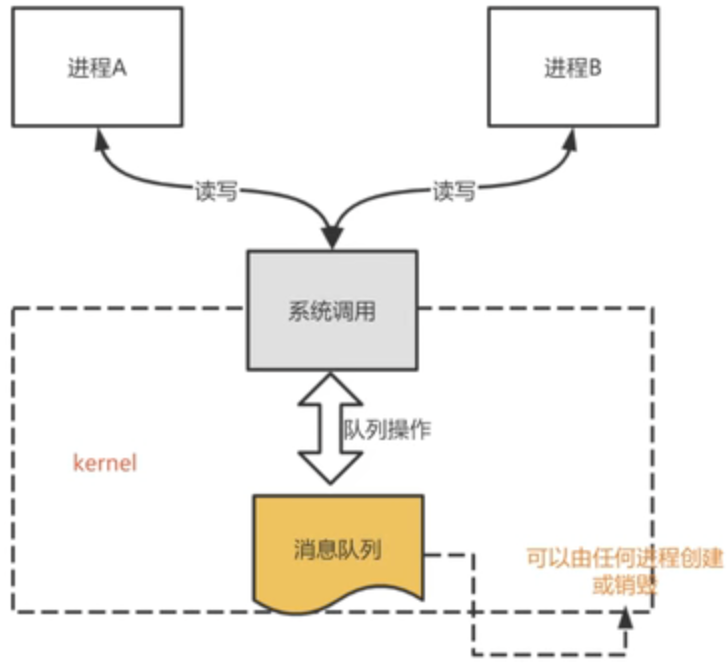
消息队列生命周期随内核,如果没有释放消息队列或者没有关闭操作系统,消息队列会一直存在,而前面提到的匿名管道的生命周期,是随进程的创建而建立,随进程的结束而销毁。
缺点:消息队列通信过程中,存在用户态与内核态之间的数据拷贝开销,因为进程写入数据到内核中的消息队列时,会发生从用户态拷贝数据到内核态的过程,同理,另一进程读取内核中的消息数据时,会发生从内核态拷贝数据到用户态的过程。
# 共享内存
消息队列的读取和写入的过程,都会有发生用户态与内核态之间的消息拷贝过程。那共享内存的方式,就很好的解决了这一问题。
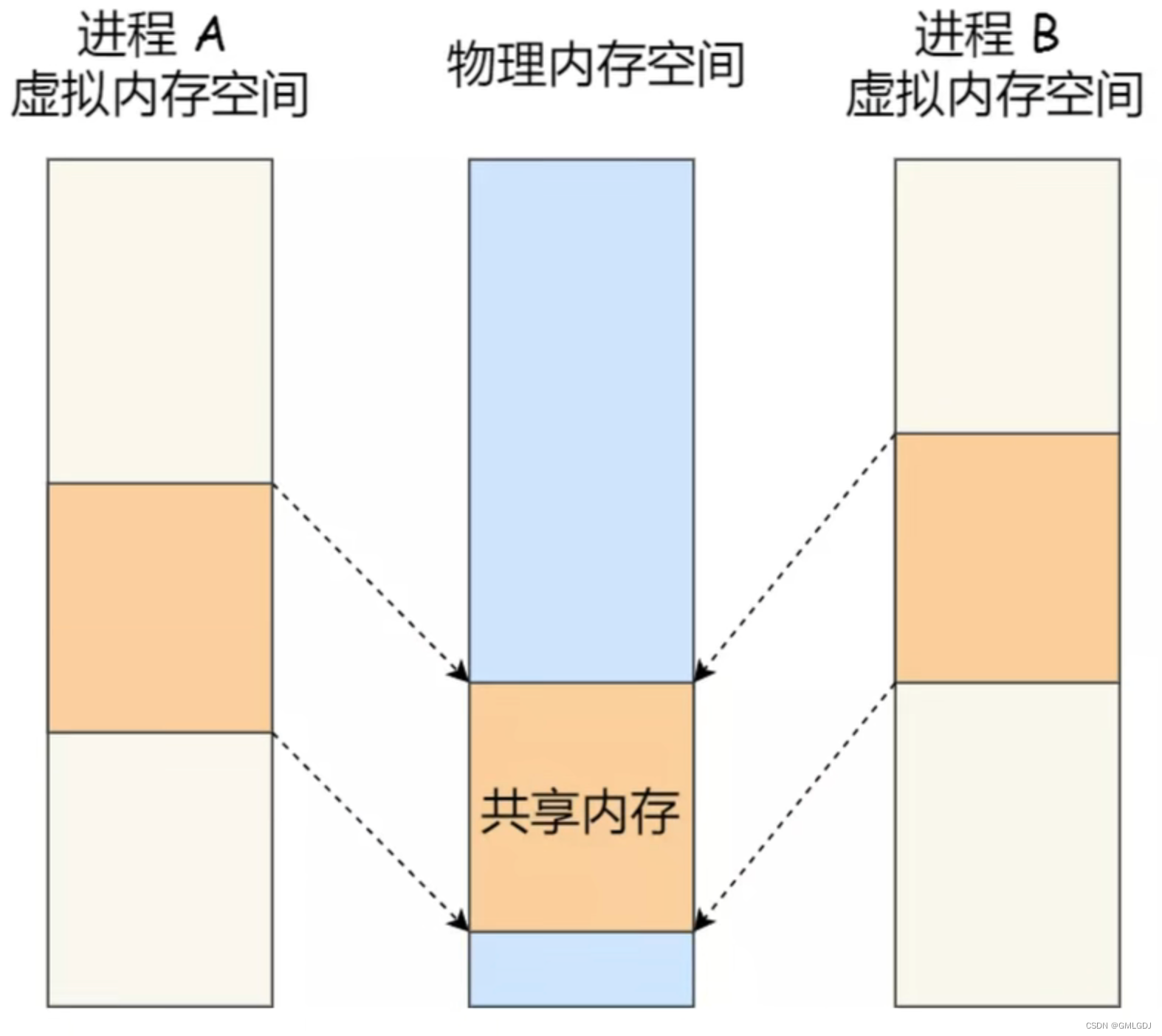
现代操作系统,对于内存管理,采用的是虚拟内存技术,也就是每个进程都有自己独立的虚拟内存空间,不同进程的虚拟内存映射到不同的物理内存中。所以,即使进程A和 进程B的虚拟地址是一样的,其实访问的是不同的物理内存地址,对于数据的增删查改互不影响。
共享内存的机制,就是拿出一块虚拟地址空间来,映射到相同的物理内存中。这样这个进程写入的东西,另外一个进程马上就能看到了,都不需要拷贝来拷贝去,传来传去, 大大提高了进程间通信的速度。
当多个进程向同一个共享内存中写入数据时可能会产生覆盖(如在工作中,当多人同时修改一份共享文档时别人可能会将你添加的内容修改删除或覆盖),如果只读则没有任何问题。
# 信号量
用了共享内存通信方式,带来新的问题,那就是如果多个进程同时修改同一个共享内存,很有可能就冲突了。例如两个进程都同时写一个地址,那先写的那个进程会发现内容被别人覆盖了。
为了防止多进程竞争共享资源,而造成的数据错乱,所以需要保护机制,使得共享的资源,在任意时刻只能被一个进程访问。正好,信号量就实现了这一保护机制。
信号量其实是一个整型的计数器,主要用于实现进程间的互斥与同步,而不是用于缓存进程间通信的数据。
信号量表示资源的数量,控制信号量的方式有两种原子操作:
- 一个是 P 操作,这个操作会把信号量减去 1,相减后如果信号量 <0,则表明资源已被占用,进程需阻塞等待;相减后如果信号量>=0,则表明还有资源可使用,进程可正常继续执行。
- 另一个是 V 操作,这个操作会把信号量加上 1,相加后如果信号量<=0,则表明当前有阻塞中的进程,于是会将该进程唤醒运行;相加后如果信号量>0,则表明当前没有阻塞中的进程。
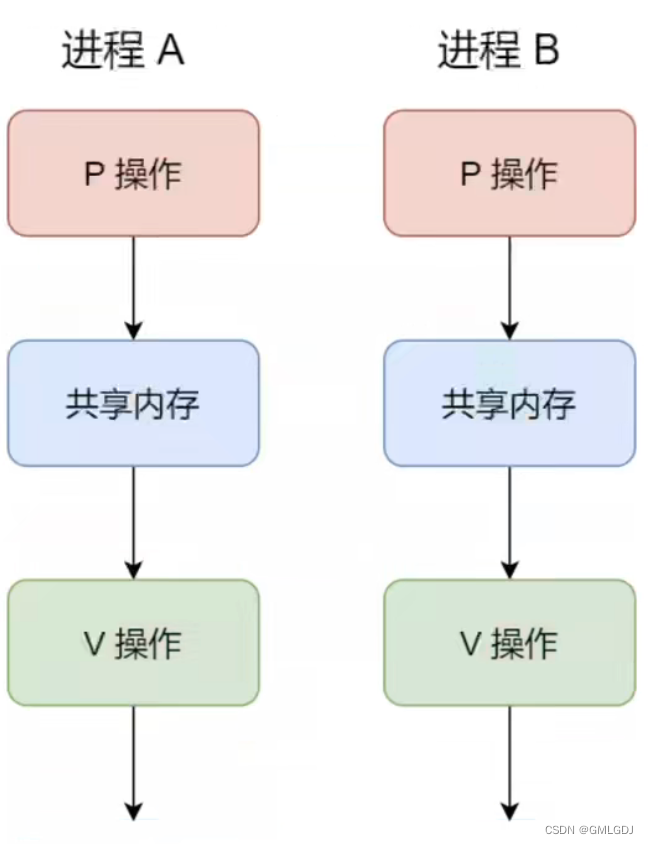
P 操作是用在进入共享资源之前,V 操作是用在离开共享资源之后,这两个操作是必须成对出现的。 接下来,举个例子,如果要使得两个进程互斥访问共享内存,我们可以初始化信号量为1。
下面举例说明:
⭐ 互斥
具体的过程如下:
- 进程 A 在访问共享内存前,先执行了 P 操作,由于信号量的初始值为 1,故在进程 A 执行 P 操作后信号量变为 0,表示共享资源可用,于是进程 A 就可以访问共享内存。
- 若此时,进程 B 也想访问共享内存,执行了 P 操作,结果信号量变为了 -1,这就意味着临界资源已被占用,因此进程 B 被阻塞。
- 直到进程 A 访问完共享内存,才会执行 V 操作,使得信号量恢复为 0,接着就会唤醒阻塞中的进程 B,使得进程 B 可以访问共享内存,最后完成共享内存的访问后,执行 V 操作,使信号量恢复到初始值 1。
可以发现,信号初始化为 1,就代表着是互斥信号量,它可以保证共享内存在任何时刻只有一个进程在访问,这就很好的保护了共享内存。
⭐ 顺序执行
在多进程里,每个进程并不一定是顺序执行的,它们基本是以各自独立的、不可预知的速度向前推进,但有时候我们又希望多个进程能密切合作,以实现一个共同的任务。
例如,进程 A 是负责生产数据,而进程 B 是负责读取数据,这两个进程是相互合作、相互依赖的,进程 A 必须先生产了数据,进程 B 才能读取到数据,所以执行是有前后顺序的。
那么这时候,就可以用信号量来实现多进程同步的方式,我们可以初始化信号量为 0。
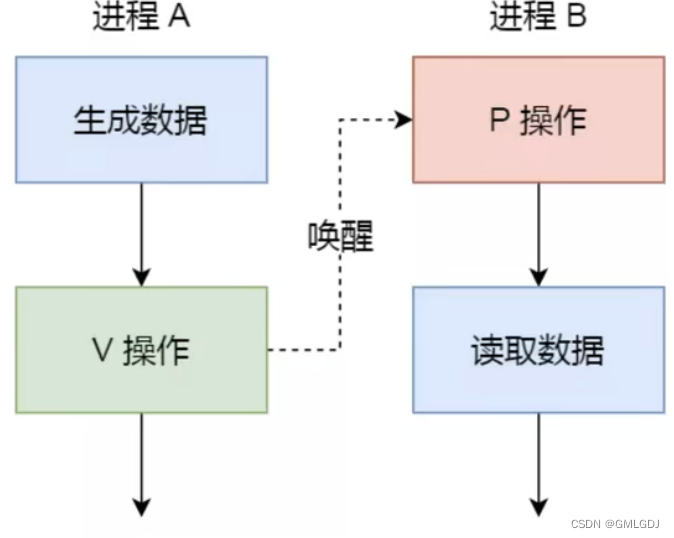
具体过程:
- 如果进程B比进程A先执行了,那么执行到P操作时,由于信号量初始值为0,故信号量会变为-1,表示进程 A 还没生产数据,于是进程B就阻塞等待;
- 接着,当进程A生产完数据后,执行了V操作,就会使得信号量变为0,于是就会唤醒阻塞在P操作的进程B;
- 最后,进程B被唤醒后,意味着进程A已经生产了数据,于是进程B就可以正常读取数据了。
可以发现,信号初始化为 0,就代表着是同步信号量,它可以保证进程A应在进程B之前执行。
# 信号
信号一般用于一些异常情况下的进程间通信,是一种异步通信,它的数据结构一般就是一个数字。
信号是进程间通信机制中唯一的异步通信机制,进程需要为信号设置相应的监听处理,当收到特定信号时,执行相应的操作,类似很多编程语言里的通知机制。
在 Linux 操作系统中,为了响应各种各样的事件,提供了几十种信号,分别代表不同的意义。我们可以通过kill -l命令,查看所有的信号。
例如,运行在 shell 终端的进程,我们可以通过键盘输入某些组合键的时候,给进程发送信号:
Ctrl+C 产生 SIGINT 信号,表示终止该进程;
Ctrl+Z 产生 SIGTSTP 信号,表示停止该进程,但还未结束;
例如,如果进程在后台运行,可以通过 kill 命令的方式给进程发送信号,但前提需要知道运行中的进程 PID 号:
kill -9 1050:表示给 PID 为 1050 的进程发送 SIGKILL 信号,用来立即结束该进程;
所以,信号事件的来源主要有硬件来源和软件来源。
- 硬件来源:键盘 Ctrl + C
- 软件来源:Kill 命令
# 套接字
前面提到的管道、消息队列、共享内存、信号量和信号都是在同一台主机上进行进程间通信,那要想跨网络与不同主机上的进程之间通信,就需要Socket通信了。
实际上,Socket 通信不仅可以跨网络与不同主机的进程间通信,还可以在同主机上进程间通信。
此方法主要用于在客户端和服务器之间通过网络进行通信。套接字是支持 TCP/IP 的网络通信的基本操作单元,可以看做是不同主机之间的进程进行双向通信的断电,简单的说就是通信的两方的一种约定,用套接字中的相关函数来完成通信过程。